4.3 Programmation
En binôme
- A partir des 4 algorithmes ci dessous correspondant à la mission 3 , réaliser le programme sous Mblock.
- vous enregistriez votre programme dans l'emplacement suivant : Espace perso:/Programmes EPI Robots/mission3, en utilisant le format suivant pour le nom du fichier : [prénom1/prénom2,...]. Assurez-vous également de sauvegarder une copie sur votre clé USB personnelle."
- Tester votre programme sur votre Mbot, puis faites valider votre essai par votre professeur.
- Demander à votre professeur de filmer votre expérimentation pour cette mission.
|
l'objectif du premier algorithme est de créer un programme permettant d'afficher en permanence la distance mesurée par le capteur à ultrason du Mbot. C'est celui ci qui nous permettra de savoir à quel moment il faut tourner! Il va donc falloir créer une VARIABLE dans Mblock: "Distance", capable de montrer la distance sur la scène de Mblock. Description du 1er ALGORITHME DE LA MISSION 3 Le programme démarre lorsque le bouton de la carte est enfoncé
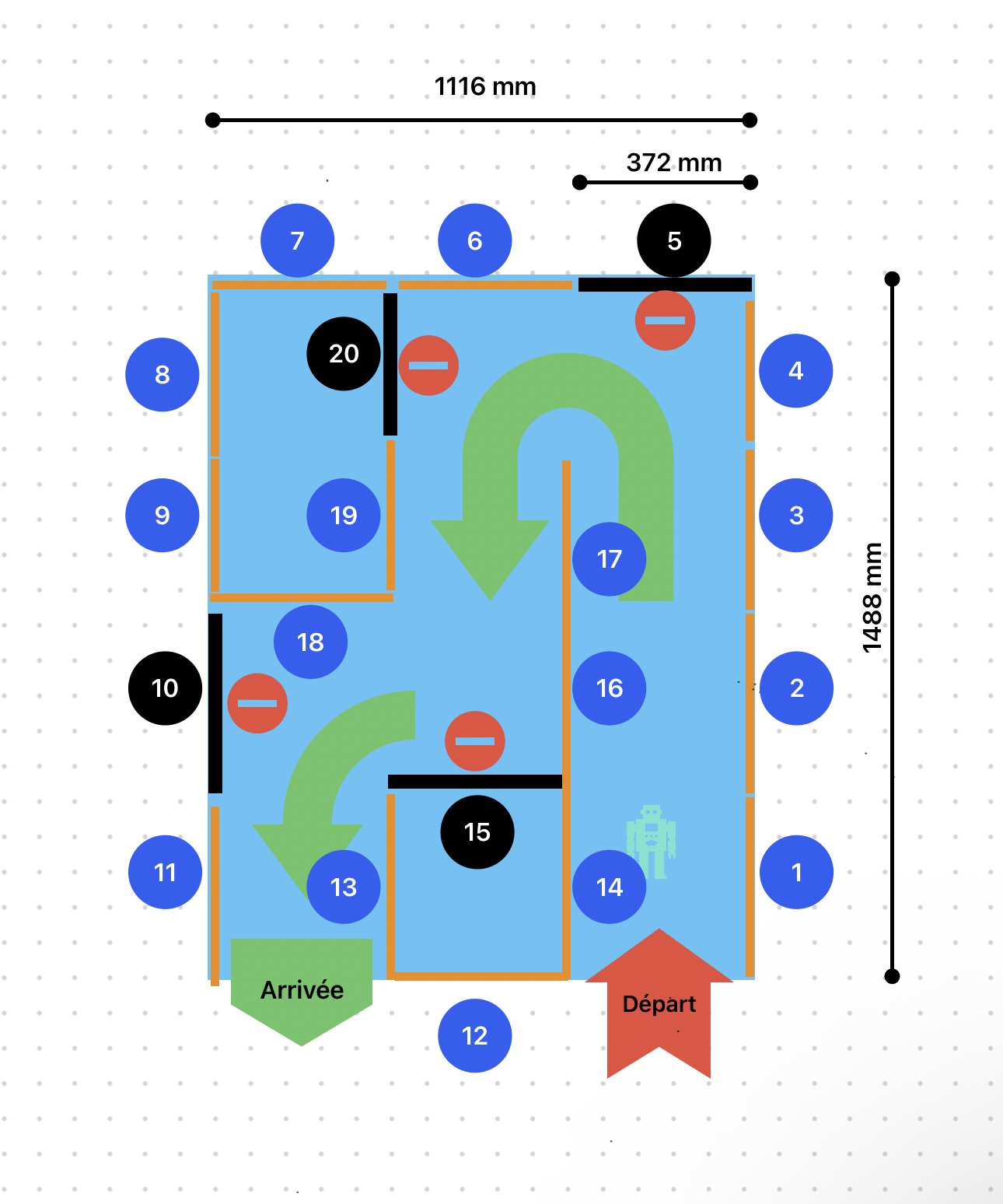
La distance mesurée par le capteur à ultrason est affichée et actualisée en permanence sur la scène de Mblock ----------------------------------------------------------------------------------------------------------------- l'objectif du second algorithme est de créer un programme permettant de parcourir le même parcours que dans la mission 2 (ci dessous), mais en déclenchant les changements de direction à l'aide de la distance mesurée par le capteur à ultrason.
Description du 2ème ALGORITHME DE LA MISSION 3 Le programme démarre lorsque le bouton de la carte est enfoncé Le robot avance tout droit jusqu'à détecter le mur Le robot s'arrête et tourne à gauche durant un certain temps pour obtenir une rotation de 90°(à définir de façon expérimentale) Le robot avance tout droit jusqu'à détecter le mur Le robot s'arrête et tourne à gauche durant un certain temps pour obtenir une rotation de 90°(à définir de façon expérimentale) Le robot avance tout droit jusqu'à détecter le mur Le robot s'arrête et tourne à droite durant un certain temps pour obtenir une rotation de 90°(à définir de façon expérimentale) Le robot avance tout droit jusqu'à détecter le mur Le robot s'arrête et tourne à gauche durant un certain temps pour obtenir une rotation de 90°(à définir de façon expérimentale) Le robot avance tout droit pendant un certain temps (à définir de façon expérimentale) ------------------------------------------------------------------------------------------------------------ Le terrain d'entrainement étant loin de votre ordinateur, l'objectif des deux derniers algorithmes est de créer un programme permettant de démarrer le programme en appuyant sur le bouton de la carte. En cas de problème, on doit pouvoir arrêter le programme à tout moment en appuyant un seconde fois sur ce même bouton. On doit pouvoir redémarrer le programme au début en appuyant à nouveau sur ce même bouton. Il va donc falloir créer une VARIABLE dans Mblock: "Appuis bouton carte", capable de compter le nombre d'appuis sur la carte. (un tutoriel est présent :ICI pour créer une nouvelle variable) Description du 3ème ALGORITHME DE LA MISSION 3 Lorsque le bouton de la carte est pressé, on doit mettre une fois la variable "Appuis bouton carte" à zéro. Après avoir attendu 1 seconde, et pendant toute la durée du programme: si le bouton est enfoncé : ajouter "1" à la variable "Appuis bouton carte" Description du 4ème ALGORITHME DE LA MISSION 3 Lorsque le bouton de la carte est pressé, et pendant toute la durée du programme on doit voir apparaître la variable sur la scène de Mblock Si la variable "Appuis bouton carte" à une valeur supérieure à zéro, stopper tout le programme. ------------------------------------------------------------------------------------------------------------------
|
Besoin d'un "coup de pouce"?
Licence: licence de propriété