5.1 Cahier des charges de la mission 4
Ressource
Cdcf Robot d'exploration 4ème mission
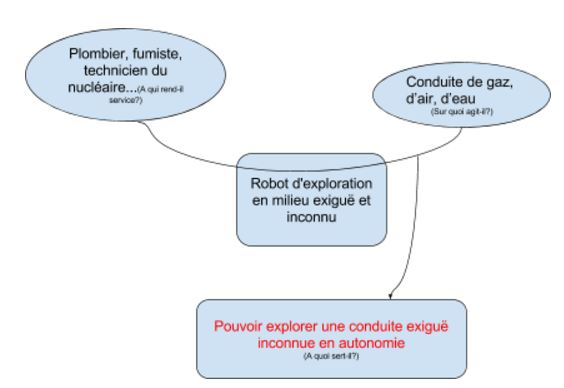
1.Expression du besoin pour notre robot d’exploration concernant la 4ème mission
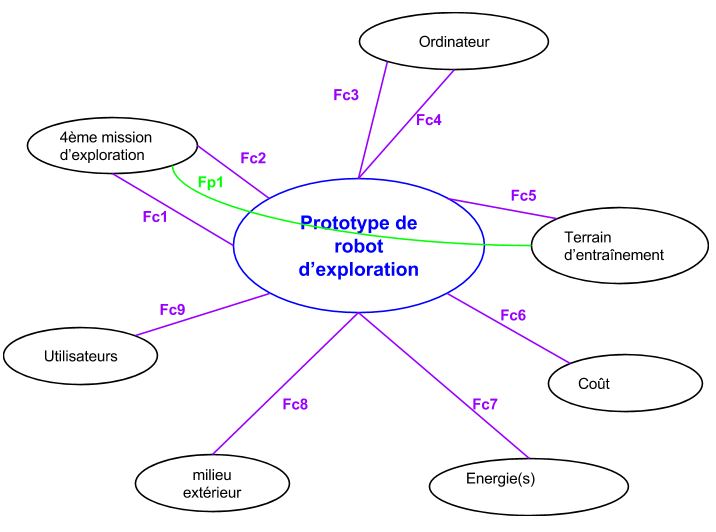
2.Diagramme pieuvre de notre prototype d’exploration pour la 4ème mission (à réaliser en technologie)
3. Définitions des éléments de l’environnement de notre prototype de robot d’exploration
Missions d’exploration: tâches à accomplir
Utilisateur: Élèves du collège
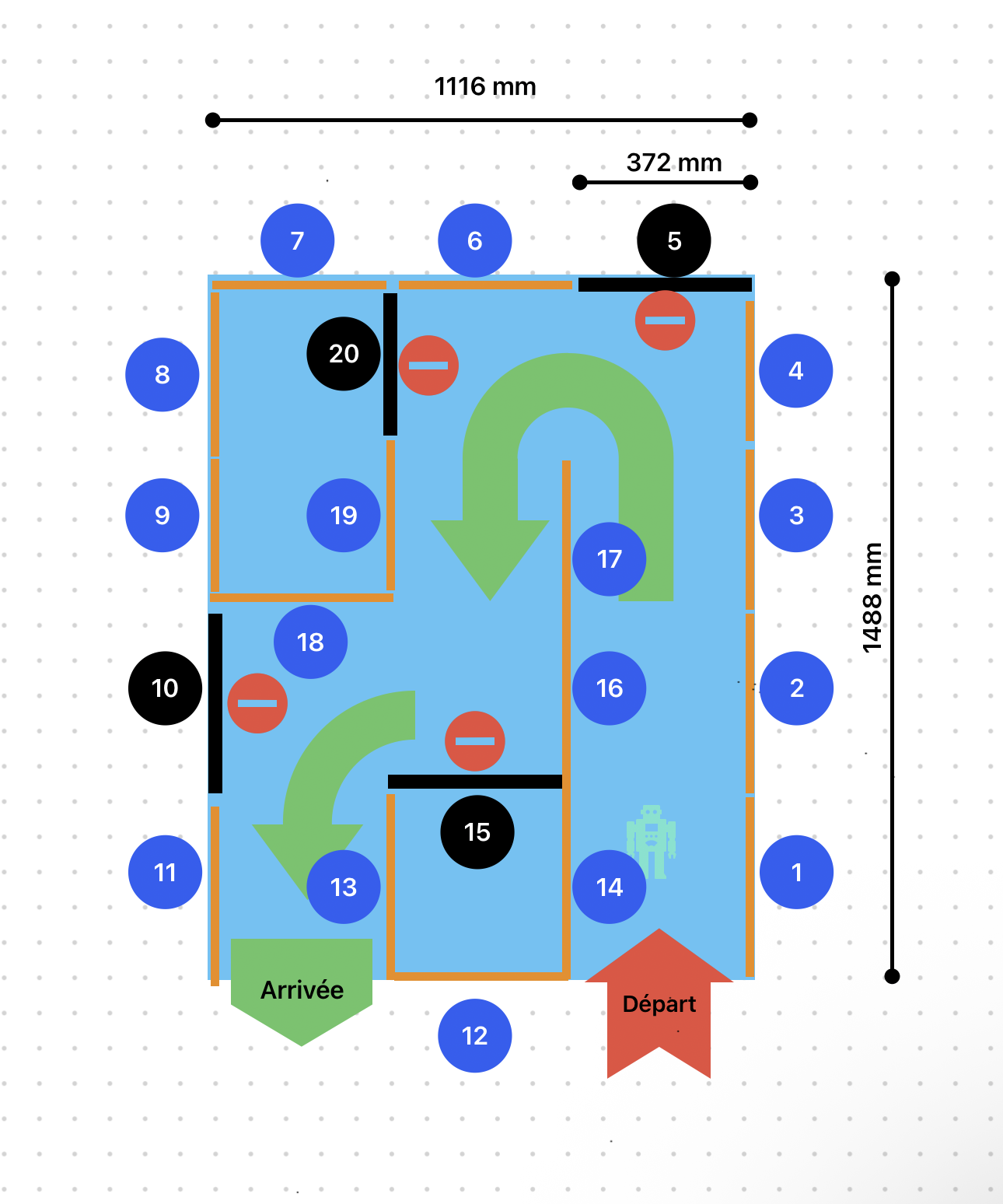
Terrain d’entraînement en Kapla – Présentation
Ce terrain d’entraînement est une structure modulable réalisée à partir de blocs en bois de type "Kapla". Chaque bloc mesure 12 mm d’épaisseur, 270 mm de longueur et 372 mm de largeur. L’ensemble est posé soit sur un établi, soit directement au sol.
Dimensions globales
Largeur totale : environ 1116 mm.
Longueur totale : environ 1488 mm.
Ces dimensions forment une surface rectangulaire idéale pour un parcours d’entraînement miniature.
Composition et organisation
Nombre de blocs
Le terrain est constitué de 20 blocs de bois, utilisés pour créer diverses zones et obstacles.
Parcours défini
Le parcours, représenté sur le schéma, est balisé par des flèches vertes indiquant les directions principales que les participants doivent suivre.
Zones spécifiques
Zones obstacles : Identifiées par des symboles rouges (⛔), elles représentent des zones interdites ou des challenges particuliers.
Blocs noirs : Numérotés (5, 10, 15, et 20), ces blocs d’une dimension de 372 mm x 85 mm x 12 mm constituent des obstacles physiques à contourner.
Blocs bleus : Numérotés de 1 à 20, ils servent de repères ou d’éléments interactifs dans le parcours.
Points de départ et d’arrivée
Le point de départ est marqué par une flèche rouge intitulée "Départ".
L’arrivée est signalée par une flèche verte intitulée "Arrivée".
Coût: Prix de revient du robot
Energie: Energie électrique 5V
Milieu extérieur: Salle de classe
Ordinateur: PC possédant Adobe Air et Mblok.
4. Définition de la fonction principale
Fp1:Mbot doit pouvoir parcourir et sortir seul d’un terrain d'entraînement aléatoire, conformément à la 4ème mission.
5. Définition des fonctions contraintes
Fc1:le robot doit pouvoir être autonome sur un chemin aléatoire.
Fc2: La trajectoire du robot doit être définie par le robot, en fonction de la forme du terrain.
Fc3:La programmation du robot doit être effectué avec le logiciel Mblock exclusivement.
Fc4:Le robot doit pouvoir être connecté à un ordinateur de façon filaire pour le téléchargement du programme
Fc5: le robot doit être adapté au terrain d'entraînement
Fc6:Le robot doit être réalisé sans coût supplémentaire par rapport au matériel déjà présent.
Fc7:Le robot doit être alimenté en énergie électrique
Fc8:Le robot doit résister au milieu extérieur
Fc8:les utilisateurs doivent pouvoir modifier la forme et les caractéristiques du robot en fonction des besoins.
6. Critères et niveaux à respecter pour chaque fonction de service
|
Fonction de service |
Critère |
niveaux |
|
Fs1:le robot doit pouvoir être autonome sur un chemin aléatoire. |
Possibilité d'intervention humaine pendant le déplacement |
Aucune |
|
Fs2:La trajectoire du robot doit être définie par le robot, en fonction de la forme du terrain. |
Type de capteur autorisé |
Tous les capteurs déjà présents sur le Mbot |
|
Fs3:La programmation du robot doit être effectué avec le logiciel Mblock exclusivement. |
Version |
3.4.6 |
|
Fs4:Le robot doit pouvoir être connecté à un ordinateur de façon filaire pour le téléchargement du programme |
type de connection filaire |
USB |
|
Fs5:le Mbot doit être adapté au terrain d'entraînement |
Largeur maxi équipé Hauteur maxi équipé Longueur maxi équipé |
-135 mm -150 mm -170 mm |
|
Fs6:Le robot doit être réalisé sans coût supplémentaire par rapport au matériel déjà présent. |
Budget |
néant |
|
Fs7:Le robot doit être rechargé en énergie électrique |
Type de connection Tension électrique |
port USB 5v |
|
Fs8:Le robot doit résister au milieu extérieur |
Humidité Température |
40--->60% 10--->30°C |
|
Fs9:les utilisateurs doivent pouvoir modifier la forme et les caractéristiques du robot en fonction des besoins. |
Capteurs: Actionneurs: Cartérisation: Pièces supplémentaires: |
-non -non -oui -Liberté totale |
Licence: licence de propriété